手机版
手机版

|
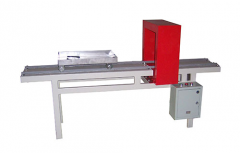
荧光磁粉全自动检测系统是近十年来国际上发展起来的一种集光、机、沧州欧谱电为一体的表面自动探伤技术。该技术利用微机采集磁粉探伤的图像并进行处理和识别, 同时控制机械动作, 达到自动探伤的目的[ 1] 。目前, 对机械工件进行的荧光磁粉检测主要由人工完成, 往往受人为因素制约, 生产效率低, 可靠性差, 不适合在线检测。笔者设计了一套工业机器视觉检测系统。在导弹引信壳体的在线生产过程中, 用图像传感器采集工件图像, 通过图像识别来判断工件的加工精度及是否存在常规缺陷。
1 、 系统设计
1. 1 、 系统组成
系统的硬件部分主要由光源、光学镜头、CCD
摄像机、步进电机及驱动器、图像采集卡、I / O 接口
卡和工控机等组成。系统整体结构框图见图1。
1. 2 、 系统工作过程
当位置传感器1 检测到传送带上的工件后, 由工控机通过I/ O 接口卡控制继电器, 先对工件进行磁化, 接着喷淋磁悬液, 到达指定位置后( 由位置传感器2 检测) , 用紫外灯照射工件, 然后使用CCD 摄像头采集数据。采集的图像经由采集卡送给工控机, 以进行后续图像处理、工件尺寸及典型缺陷的判断。检测结束后对工件进行退磁处理。图像的采集和处理非常重要, 是整个系统可靠运行的保障, 以下进行重点介绍。
2 、 图像检测方法
2. 1 、 图像信号预处理
一般情况下, 成像系统获取的图像( 原始图像)
由于受到种种条件限制和随机干扰, 往往不能在视觉系统中直接使用, 必须对原始图像进行灰度校正、噪声过滤等图像预处理。对机器视觉系统来说, 所用的图像预处理方法并不考虑图像降质原因, 只需将图像中感兴趣的特征有选择地突出, 衰减其不需要的特征, 故预处理后的输出图像并不需要去逼近原图像[ 2] 。系统针对原始图像主要进行Laplacian 算子锐化处理。能够进行锐化处理的图像必须具有较高的信噪比, 否则锐化后图像信噪比反而更低, 因此需要先去除或减轻噪声后再进行锐化处理。
2. 2 、 图像分割
图像分割的任务是把图像分成互不交叠的区域。合适的图像分割方法需要根据实际情况选择,既可以采用区域分割或边界分割来分类, 也可以用并行分割或串行分割来分类[ 3] 。
( 1) 并行边界分割
经典的边缘提取方法是利用边缘邻近一阶或二阶方向导数变化规律, 沧州欧谱考察图像的每个像素在某邻域内灰度的变化。如果一个像素落在图像中某一个物体的边界上, 那么它的邻域将成为一个灰度级的变化带。这种变化用灰度的变化率和方向( 即梯度向量的幅度和方向) 来表示。梯度对应的是一阶导数的信息, 梯度算子是一阶导数算子。在边缘灰度值过渡比较明显, 而且在图像模糊程度和噪声较低的情况下, 梯度算子可以得到满意的结果。实际的图像处理中, 二阶导数信息也经常使用。在有些情况下( 如灰度变化均匀的图像) , 只利用一阶导数可能找不到边界, 此时二阶导数就能提供有用信息。一般来讲, 图像处理的过程中, 对图像可以采用差分方法计算三阶或者更高阶导数。但是因为噪声的影响, 三阶以上的导数信息往往失去了应用价值, 所以实际图像分割往往只用到二阶导数。构造边缘检测算子的数学基础是一阶和二阶导数变化, 二维图像x 和y 方向的导数变化用梯度G x和Gy 表示。对Gx 和G y 各用一个模板, 然后把两个模板组合起来构成一个梯度算子。常用的算子有Ro bert s 算子、Prew it t 算子、S o bel 算子和Laplacian算子等。针对导弹引信壳体内径的机器视觉图像检测系统, 不同算法的边缘检测效果见图2。图2 可见Sobel 算子具有较好的噪声抑制能力, 在检测阶跃边缘时得到的边缘宽度至少为两个像素( 在图中边缘的宽度较Robert s 和Prew it t 宽) ;Laplacian 算子对噪声比较敏感, 由噪声引起了假边缘, 同时也去除一些细微边缘; 本例中利用Pr ew it t算子的边缘检测效果最好。
( 2) 图像的空穴检出
空穴是由白色背景区域包围起来的一个黑色区域。通常空穴检出的对象是只有黑色和白色两种颜色的二值图像。对利用Prew it t 算子分割后的二值图像进行阈值面积消除( 阈值取50 个像素点) 。基
本思想是先将空穴检出, 然后检查每个空穴的面积, 如果小于阈值, 就将当前空穴所有的像素赋以背景
值, 进行消去。
( 3) 串行区域分割
串行区域分割是采用串行处理策略对目标区域直接检测来实现分割的方法。其特点是整个处理过程可以分解为多个步骤。一般可以分成区域生长和分裂合并两种方法。区域生长是指从某个像素出发, 按照一定的准则, 逐步加入邻近像素, 当满足一定的条件时, 区域生长终止。文中对阈值面积消去的二值图像进行区域生长。其中初始种子点选取为图像的中心点, 生长准则是像素值的绝对值小于设定的阈值
( 4) 串行边界分割
串行边界分割技术是指采用串行的方法对目标边界检测来实现分割的方法。沧州欧谱通常通过依次搜索边缘点来工作, 一般有三个关键步骤: 起始边缘点的确定。 搜索准则( 将根据这个准则确定下一个边
缘点) 。! 终止条件( 设定搜索过程结束的条件) 。轮廓跟踪是由梯度图中一个边缘点出发, 搜索
并连接边缘点进而逐步检测所有边界的方法。前面提到的并行边缘图像分割方法, 边缘像素不一定能
够组成闭合的曲线, 这是因为边界上有可能会遇到缺口。缺口可能太大而不能用一条直线或者曲线连
轮廓跟踪结果接, 也有可能不是同一条边界上的缺口。轮廓跟踪的方法则可以在一定程度上解决这些问题, 对于某些图像, 该方法的分割效果更好。对区域生长后的图像进行轮廓跟踪得到的图像
2. 3 、 特征选取
在进行尺寸计算的时候, 首先可以使用像素数量来表示空间尺度。然后将监视器上尺寸乘以一个像素的面积加以适当地校准。通常这个计算过程并不十分复杂[ 4] 。系统采用求取面积和周长两个物理量并以此作为判断工件是否合格的特征。目标区域的面积即是区域中的像素总数。面积只与该物体图像的边界所围成的区域大小有关, 与其内部灰度级的变化无关。可采用一次扫描来完成其面积的计算。具体方法为: 按行逐行扫描图像, 分别记录相同标号区域内目标像素点的个数, 这样就可以得到每一个区域内目标图像的面积。物体的周长常常可以用来区别具有简单或复杂形状的物体。一个形状简单的物体用相对较短的周长来包围它所占有的面积。区域的周长通常定义为每个标号区域边界的面积, 即边界的点数, 周长同样可以用扫描法得到。
3 、 精度分析
图像检测是测量方法中的一个较新的分支, 油漆测厚仪http://www.youqicehouyi.com 其特点是利用CCD 对被测物体进行光学成像, 然后用图像技术完成实时在线或非接触测量[ 5] 。采集的原始图像质量非常重要, 不良采集甚至会造成图像测
量的错误。系统中采集设备中有些因素会对测量过程造成影响, 如摄像头分辨率、放大倍数、镜头几何
畸变及采集卡捕捉图像的性能等。CCD 像敏面上成像的稳定性与准确性对视觉检测系统的影响很
大, 像敏单元的几何尺寸越小, 则响应非均匀度越低, 芯片的分辨率越高, 测量误差越小。步进电机和传感器的安装精度对测量结果的准确性有很大影响, 如传感器轴心与CCD 不平行、步进电机轴心与传输带不垂直等将导致测量误差。通过实测, 系统的测量精度可达0. 01 mm, 达到设计要求, 满足导弹引信壳体检测的需要。
4 、 结论
机器视觉检测技术具有非接触、在线实时、速度快、精度合适和现场抗干扰能力强等优点, 能够实现
机械产品的零废品生产目标, 因此具有很高的实用价值和良好的应用前景。
|